03
The rig
The bench hardware. Slots fill as each correct photo is placed with its verified caption.

01
Network rack
—
02
Victus HQ
—

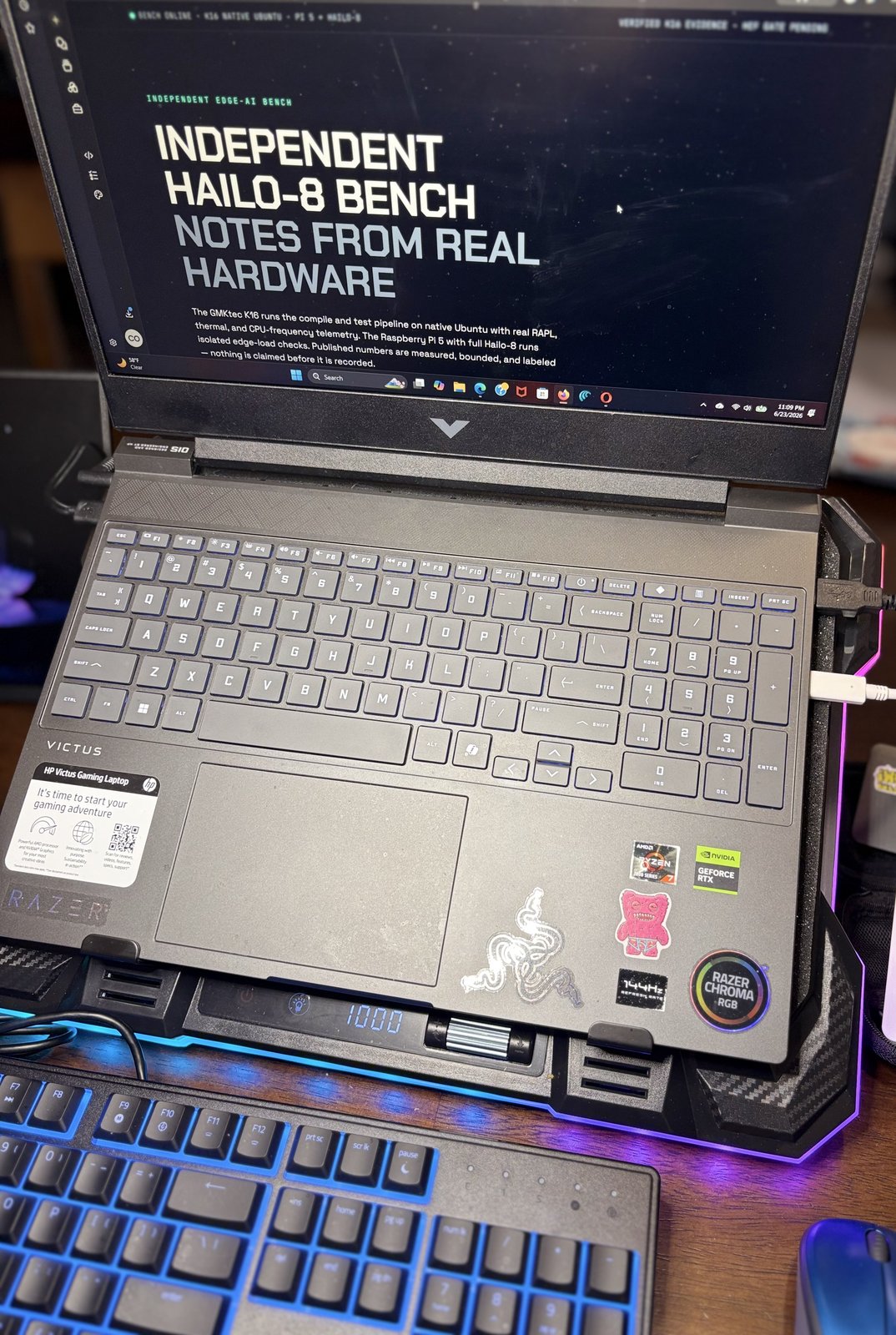
03
Victus HQ
—
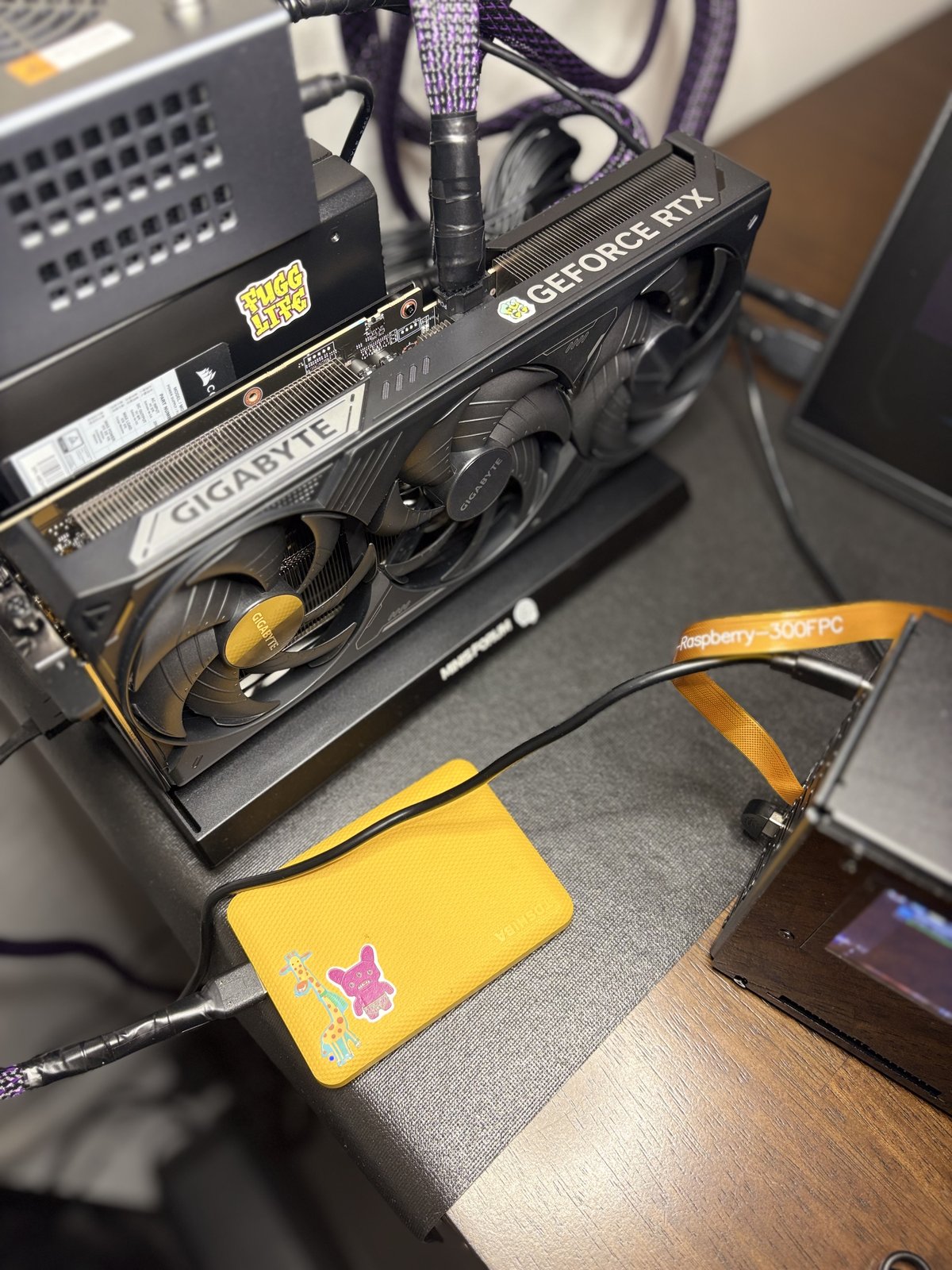
04
GeForce 5070 Ti CUDA Torque close up
—

05
GMKtec K16 — close up
—

06
GMKtec K16 — close up
—

07
HAILO-8 Close up / BESTOSS 1TB NVMe SSD
—

08
The full CUDA Copperhead Snake rig
—
09
The K16 Testing Monitor
—
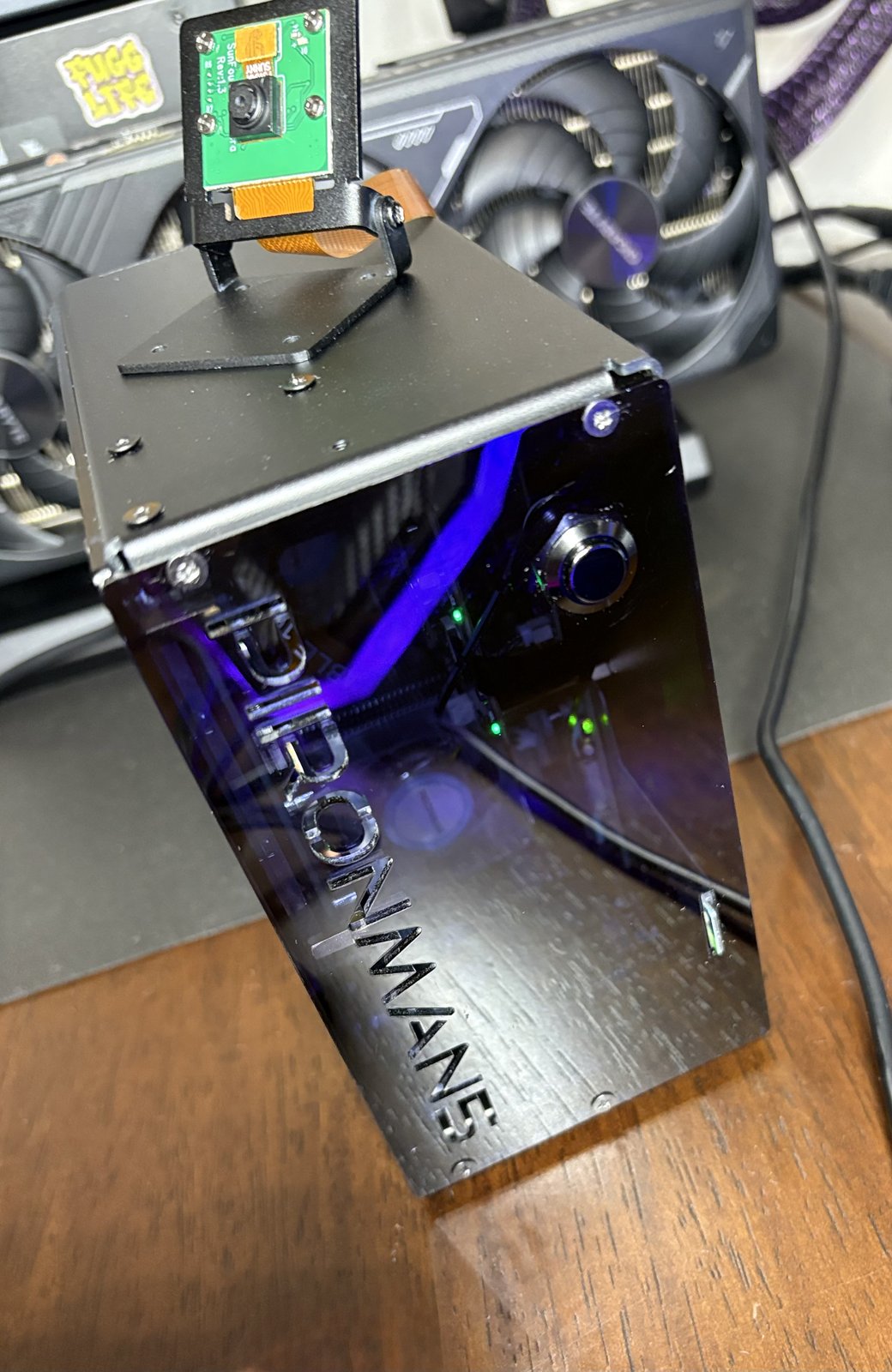
10
Pironman 5 Pro Max Face up close
—

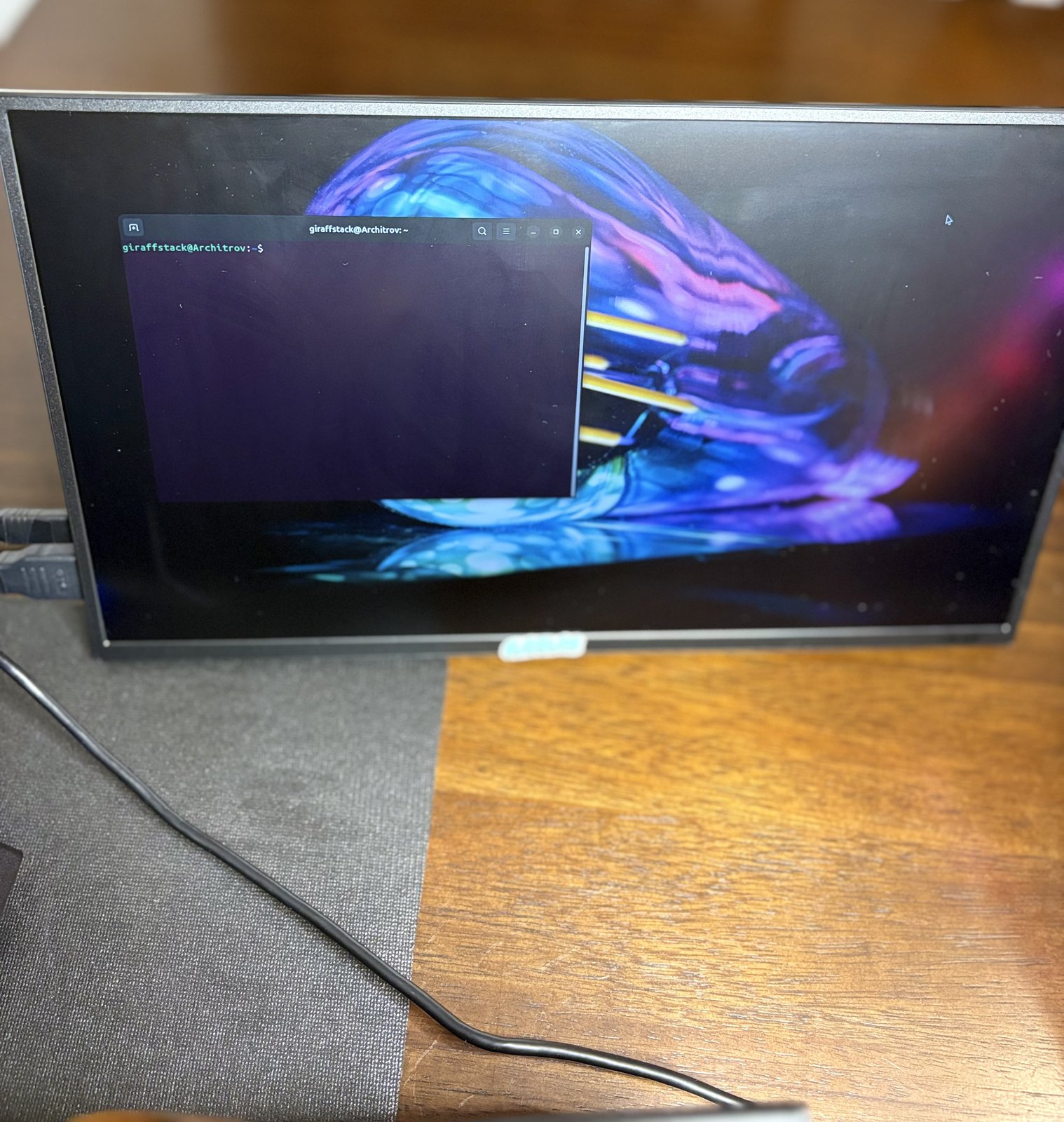
11
Pironman 5 Pro Max Screen Close Up
Ubuntu Terminal loaded on screen

12
The whole entire set-up
—
13
SunFounder Rev:1.3 Hailo camera
—
- Bench hostGMKtec K16 · native Ubuntu
- TelemetryRAPL · thermal · cpufreq
- Edge targetPi 5 + Hailo-8 · 26 TOPS
- Compile archx86_64
- WorkstationHP Victus · WSL2
- AccelerationeGPU rig